
During my time as a graduate researcher at UCLA’s Robotics and Mechanisms Laboratory (RoMeLa), I’ve had the chance to work on a wide variety of robotics projects ranging from a hexapod to several full-size humanoids. My research focused on utilizing mathematical optimization, model predictive control and hardware modifications to achieve robust, agile and versatile locomotion algorithms for highly nonlinear dynamical systems.
The following is a brief overview of robot projects that I’ve worked on.
Click each robot’s picture to view more details.
Links to papers that I’ve published are at the bottom of the page.
Robots I’ve worked on

Surveyor
Role: Technical lead, Control system design, Electronics/Sensors integration
- Designed an autonomous navigation system for an all-terrain mobile robot designed to map outdoor/unstructured/rough terrain.
- Developed precision odometry and positioning system using state of the art sensor fusion techniques.
- System integration between proprietary hardware platform, ROS and web-based HMI.
- Built custom simulation environment using Gazebo Ignition.
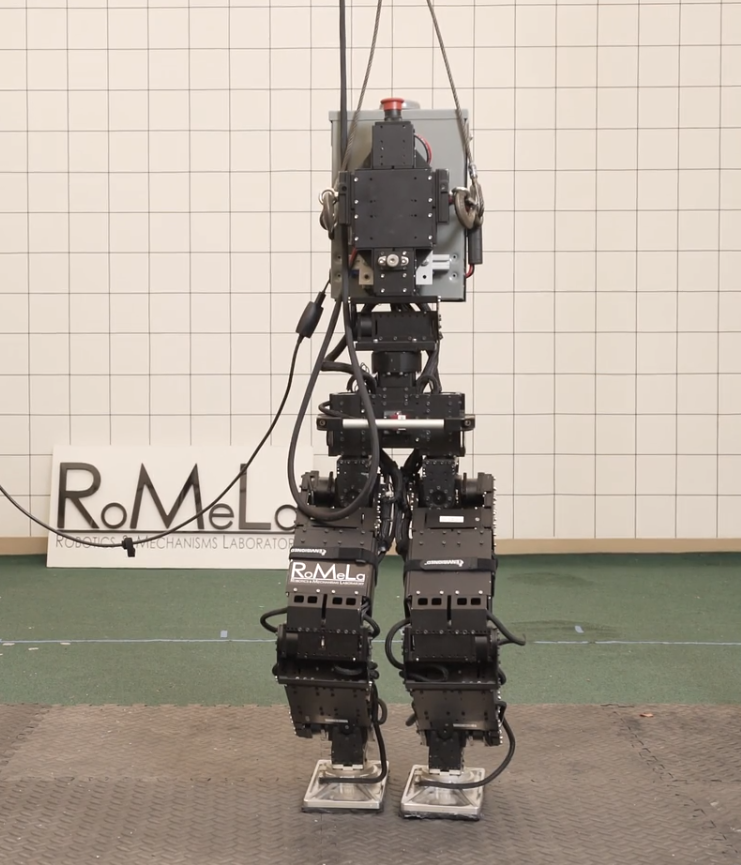
PEBL
Role: Project lead, Software Architecture, Control system design, Electronics/Sensors
- Re-built robotic platform from DARPA robotics challenge with new sensor suite.
- Developed new software stack, simulation environment and control system to implement locomotion algorithms.
- Integration of new sensor suite: F/T sensor, IMU & RGBD camera.
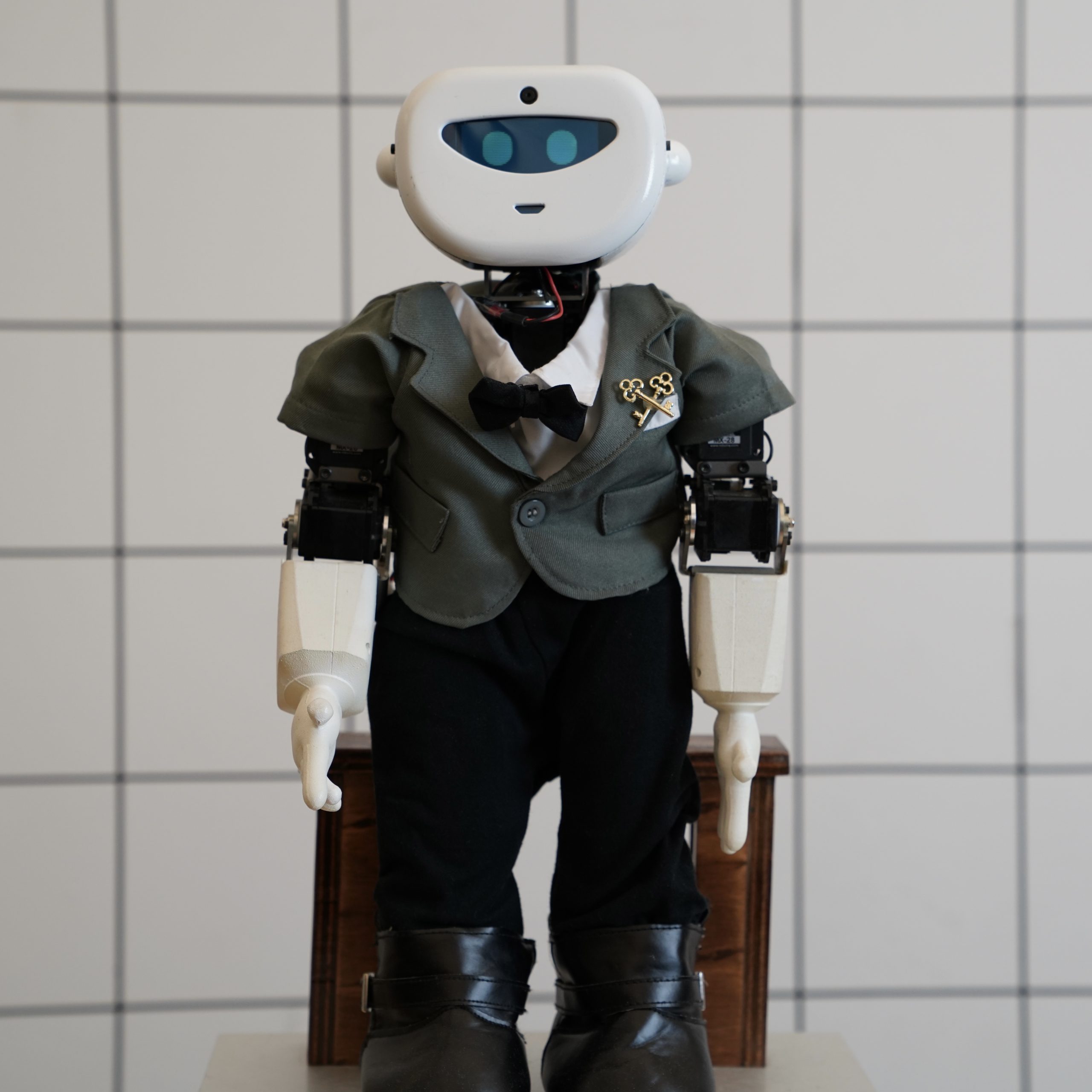
LARA
Role: Electronics/hardware lead
- Fabricate arms, legs and head of robot
- Design electronics system for head including movable eyes/webcam; integrated components for user interaction, power and networking
- Built keyframing system for designing motion sequences

MAGI
Role: Hardware platform design, software/simulation engineer
- Built robotic platform for bimanual manipulation of objects to perform magic!
- Developed simulation of robot in CoppeliaSim.
- Developed motor control framework (forward/inverse kinematics, motion interpolation, using redundant degrees of freedom)

Hexapod
Role: Project advisor/mentor
- Mentored several students as part of UCLA’s High School Summer Research Program
- Designed tactile sensing/proprioceptive system to allow hexapod to walk over obstacles without vision sensors
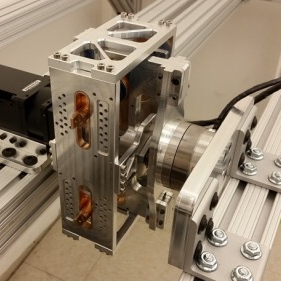
Series Elastic Actuator
Role: System analysis, electronics integration
- Developed software and electronics system for series elastic actuator.
- Experimentally determined bandwidth of series elastic actuator with various amounts of compliance

THOR-RD
Role: Mechanical Design
- Designed multiple feet prototypes for robot using CNC machining/3D printing
- Support at DARPA Robotics Challenge Finals 2015 as part of Team THOR
Papers
Team THOR’s Entry in the DARPA Robotics Challenge Finals 2015 – Journal of Field Robotics 2017
Lessons Learned from the Development and Deployment of a Hotel Concierge Robot to be Operated in a Real World Environment – International Conference on Ubiquitous Robots (UR) 2019
Experimental validation of unlumped model and its design implications for rotary series elastic actuators – ASME IDETC 2017
A Re-Evaluation of Adult-Size Bipedal Humanoids with Non-Backdrivable Actuators for Legged Locomotion (Thesis) – UCLA 2023