
Surveyor and Excavator are part of a pilot project that seeks to enable autonomous mapping and navigation capabilities for robots in rough terrain and extreme environments.
As part of my work with Offworld, I was the Lead engineer for the mobile robots’ control & planning system. I also designed the autonomous navigation stack (control, planning, odometry, perception, mapping) for the current generation of mobile robots. I was also closely involved in system integration, evaluation and test engineering.
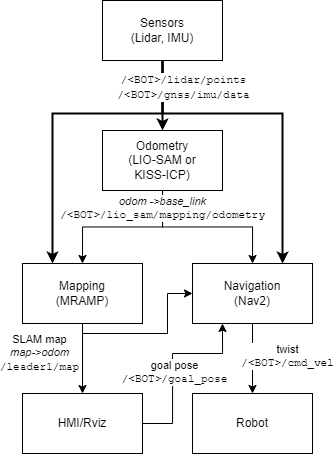
Designing the navigation system
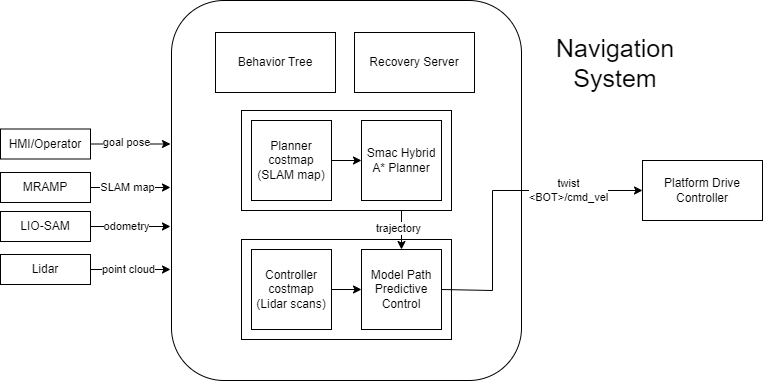
The autonomous navigation system makes use of the tight integration between ROS2 and the Navigation2 stack.
This system features functional perception, mapping and navigation systems for a tracked, mobile robot platform with the following highlights:
- Kinematically-aware global planning (incorporating knowledge of the robot’s footprint)
- A custom slope + elevation aware costmap plugin for ROS2.
- Robust odometry using Lidar-IMU fusion based on LIO-SAM.
- Integration with web-based HMI and platform abstraction layer.
- Multi-robot collaborative mapping based on modifications to the LAMP collaborative mapping framework.
- Real-time collision avoidance of dynamic obstacles.
Simulator design
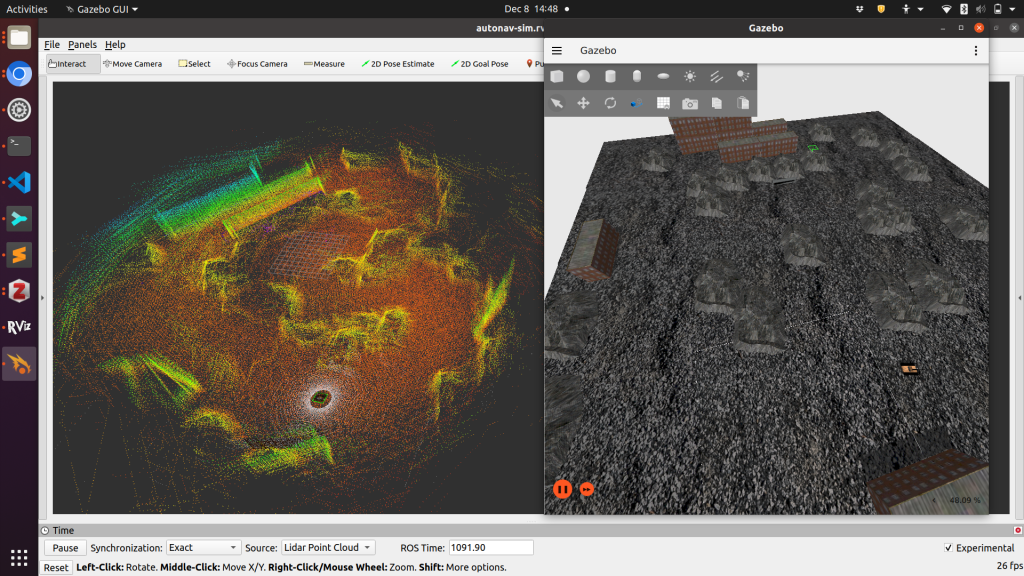
I also developed a customized simulation for testing robot operation using Gazebo Ignition and ROS2. The screenshot above shows a simulated SLAM map created from simulation data on the left and the 3D rendered robot simulation on the right.